New Mars Forums
You are not logged in.
- Topics: Active | Unanswered
Announcement
#1 2018-03-19 02:42:50
- RobertDyck
- Moderator
- From: Winnipeg, Canada
- Registered: 2002-08-20
- Posts: 8,241
- Website
Autonomous Flying Microrobots (RoboBees)
Wyss Institute at Harvard University: Autonomous Flying Microrobots (RoboBees)
Autonomously flying microrobots with potential uses in crop pollination, search and rescue missions, surveillance, as well as high-resolution weather, climate and environmental monitoring
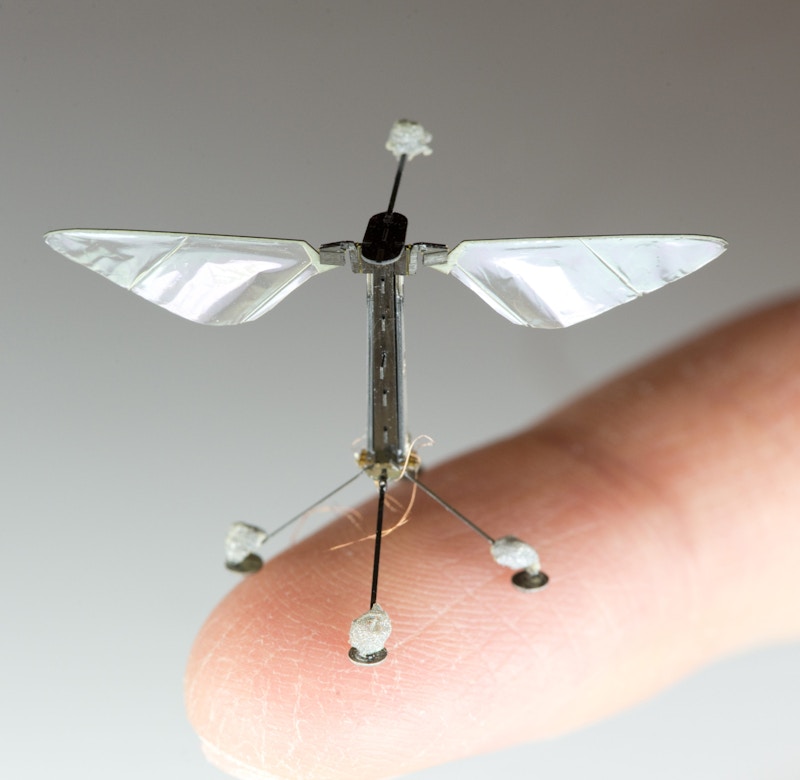
Inspired by the biology of a bee, researchers at the Wyss Institute are developing RoboBees, manmade systems that could perform myriad roles in agriculture or disaster relief. A RoboBee measures about half the size of a paper clip, weighs less that one-tenth of a gram, and flies using “artificial muscles” compromised of materials that contract when a voltage is applied. Additional modifications allow some models of RoboBee to transition from swimming underwater to flying, as well as “perch” on surfaces using static electricity.
The masterminding of the RoboBee was motivated by the idea to develop autonomous micro-aerial vehicles capable of self-contained, self-directed flight and of achieving coordinated behavior in large groups. To that end, the RoboBee development is broadly divided into three main components: the Body, Brain, and Colony. Body development consists of constructing robotic insects able to fly on their own with the help of a compact and seamlessly integrated power source; brain development is concerned with “smart” sensors and control electronics that mimic the eyes and antennae of a bee, and can sense and respond dynamically to the environment; the Colony’s focus is about coordinating the behavior of many independent robots so they act as an effective unit.
To construct RoboBees, researchers at the Wyss Institute have developed innovative manufacturing methods, so-called Pop-Up microelectromechanical (MEMs) technologies (please also see the Pop-Up MEMS technology page) that have already greatly expanded the boundaries of current robotics design and engineering.
All areas for the use of RoboBees are available for licensing.
Click image for video:
Paper published in Science, 20 May 2016 (pay wall): Perching and takeoff of a robotic insect on overhangs using switchable electrostatic adhesion
Science, 25 October 2017 (pay wall): A biologically inspired, flapping-wing, hybrid aerial-aquatic microrobot
Abstract
From millimeter-scale insects to meter-scale vertebrates, several animal species exhibit multimodal locomotive capabilities in aerial and aquatic environments. To develop robots capable of hybrid aerial and aquatic locomotion, we require versatile propulsive strategies that reconcile the different physical constraints of airborne and aquatic environments. Furthermore, transitioning between aerial and aquatic environments poses substantial challenges at the scale of microrobots, where interfacial surface tension can be substantial relative to the weight and forces produced by the animal/robot. We report the design and operation of an insect-scale robot capable of flying, swimming, and transitioning between air and water. This 175-milligram robot uses a multimodal flapping strategy to efficiently locomote in both fluids. Once the robot swims to the water surface, lightweight electrolytic plates produce oxyhydrogen from the surrounding water that is collected by a buoyancy chamber. Increased buoyancy force from this electrochemical reaction gradually pushes the wings out of the water while the robot maintains upright stability by exploiting surface tension. A sparker ignites the oxyhydrogen, and the robot impulsively takes off from the water surface. This work analyzes the dynamics of flapping locomotion in an aquatic environment, identifies the challenges and benefits of surface tension effects on microrobots, and further develops a suite of new mesoscale devices that culminate in a hybrid, aerial-aquatic microrobot.
25 October 2017: New RoboBee flies, dives, swims, and explodes out of the water
We’ve seen RoboBees that can fly, stick to walls, and dive into water. Now, get ready for a hybrid RoboBee that can fly, dive into water, swim, propel itself back out of water, and safely land.
New floating devices allow this multipurpose air-water microrobot to stabilize on the water’s surface before an internal combustion system ignites to propel it back into the air.
...
Designing a millimeter-sized robot that moves in and out of water has numerous challenges. First, water is 1,000 times denser than air, so the robot’s wing flapping speed will vary widely between the two mediums. If the flapping frequency is too low, the RoboBee can’t fly. If it’s too high, the wing will snap off in the water.By combining theoretical modeling and experimental data, the researchers found the Goldilocks combination of wing size and flapping rate, scaling the design to allow the bee to operate repeatedly in both air and water. Using this multimodal locomotive strategy, the robot to flaps its wings at 220 to 300 hertz in air and nine to 13 hertz in water.
Another major challenge the team had to address: at the millimeter scale, the water’s surface might as well be a brick wall. Surface tension is more than 10 times the weight of the RoboBee and three times its maximum lift. Previous research demonstrated how impact and sharp edges can break the surface tension of water to facilitate the RoboBee’s entry, but the question remained: How does it get back out again?
To solve that problem, the researchers retrofitted the RoboBee with four buoyant outriggers — essentially robotic floaties — and a central gas collection chamber. Once the RoboBee swims to the surface, an electrolytic plate in the chamber converts water into oxyhydrogen, a combustible gas fuel.
“Because the RoboBee has a limited payload capacity, it cannot carry its own fuel, so we had to come up with a creative solution to exploit resources from the environment,” says Elizabeth Farrell Helbling, graduate student in the Microrobotics Lab and co-author of the paper. “Surface tension is something that we have to overcome to get out of the water, but is also a tool that we can utilize during the gas collection process.”
The gas increases the robot’s buoyancy, pushing the wings out of the water, and the floaties stabilize the RoboBee on the water’s surface. From there, a tiny, novel sparker inside the chamber ignites the gas, propelling the RoboBee out of the water. The robot is designed to passively stabilize in air, so that it always lands on its feet.
“By modifying the vehicle design, we are now able to lift more than three times the payload of the previous RoboBee,” says Chen. “This additional payload capacity allowed us to carry the additional devices including the gas chamber, the electrolytic plates, sparker, and buoyant outriggers, bringing the total weight of the hybrid robot to 175 miligrams, about 90mg heavier than previous designs. We hope that our work investigating tradeoffs like weight and surface tension can inspire future multi-functional microrobots – ones that can move on complex terrains and perform a variety of tasks.”
Because of the lack of onboard sensors and limitations in the current motion-tracking system, the RoboBee cannot yet fly immediately upon propulsion out of water but the team hopes to change that in future research.
“The RoboBee represents a platform where forces are different than what we – at human scale – are used to experiencing,” says Wyss Core Faculty Member Robert Wood, Ph.D., who is also the Charles River Professor of Engineering and Applied Sciences at Harvard and senior author of the paper. “While flying the robot feels as if it is treading water; while swimming it feels like it is surrounded by molasses. The force from surface tension feels like an impenetrable wall. These small robots give us the opportunity to explore these non-intuitive phenomena in a very rich way.”

Click image for video:
19 May 2016: Using static electricity, RoboBees cling to surface
In a recent article in Science, Harvard roboticists demonstrate that their flying microrobots, nicknamed the RoboBees, can now perch during flight to save energy — like bats, birds or butterflies.
“Many applications for small drones require them to stay in the air for extended periods,” said Moritz Graule, first author of the paper, who was a student researcher at the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) and the Wyss Institute for Biologically Inspired Engineering at Harvard University at the time the study was conducted. “Unfortunately, smaller drones run out of energy quickly. We want to keep them aloft longer without requiring too much additional energy.”
The team found inspiration in nature and simple science.
“A lot of different animals use perching to conserve energy,” said co-author Kevin Ma, Ph.D., a Postdoctoral Researcher at SEAS and the Wyss Institute. “But the methods they use to perch, like sticky adhesives or latching with talons, are inappropriate for a paperclip-size microrobot, as they either require intricate systems with moving parts or high forces for detachment.”
Instead, the team turned to electrostatic adhesion — the same basic science that causes a static-charged sock to cling to a pant leg or a balloon to stick to a wall.
When you rub a balloon on a wool sweater, the balloon becomes negatively charged. If the charged balloon is brought close to a wall, its negative charge forces some of the wall’s electrons away, leaving the surface positively charged. The attraction between opposite charges then causes the balloon to stick to the wall.
“In the case of the balloon, however, the charges dissipate over time, and the balloon will eventually fall down,” said Graule. “In our system, a small amount of energy is constantly supplied to maintain the attraction.”
The RoboBee, initially pioneered at the Harvard Microrobotics Lab, has now been updated to include an electrode patch and a foam mount that absorbs shock. The new perching components weigh 13.4 mg, bringing the total weight of the robot to about 100mg — similar to the weight of a real bee. The robot takes off and flies normally. When the electrode patch is supplied with a charge, it can stick to almost any surface, from glass to wood to a leaf. To detach, the power supply is simply switched off.
Click image for video:
Last edited by RobertDyck (2018-03-19 03:37:34)
Offline
Like button can go here
#2 2018-03-19 18:49:28
- kbd512
- Administrator
- Registered: 2015-01-02
- Posts: 8,307
Re: Autonomous Flying Microrobots (RoboBees)
Rob,
Can it carry a camera of any kind?
If it can, then I can think of some uses for swarms of these things.
Offline
Like button can go here
#3 2018-03-19 19:15:06
- louis
- Member
- From: UK
- Registered: 2008-03-24
- Posts: 7,208
Re: Autonomous Flying Microrobots (RoboBees)
Once these are fully developed they will very possibly cause a war...because there can be no real distinction between their use for espionage, and their use for invasion. Think how you could screw up a missile launch site with these little guys operating at will, nibbling away at wires etc.
Let's Go to Mars...Google on: Fast Track to Mars blogspot.com
Offline
Like button can go here
#4 2018-03-19 20:09:03
- SpaceNut
- Administrator
- From: New Hampshire
- Registered: 2004-07-22
- Posts: 29,743
Re: Autonomous Flying Microrobots (RoboBees)
Agreed that makes it an ethical issue of what is research and what is a weapon.
Offline
Like button can go here
#5 2018-03-20 02:05:01
- RobertDyck
- Moderator
- From: Winnipeg, Canada
- Registered: 2002-08-20
- Posts: 8,241
- Website
Re: Autonomous Flying Microrobots (RoboBees)
The CIA has had an insect size spy drone for a few years. Here's an article from August 2012. (click image) It was reported it can carry a camera, microphone, take a DNA sample, or drop an RFID tag on you. So it's already weaponized, the article in my initial post is the civilian version. This article claims this image is a "conceptual mock-up". It also claims...
Some efforts in MAV research have involved trying to mimic birds or flying insects to achieve flight capabilities not attainable through other means of aerial propulsion. In 2007 a bug-like MAV model with a 3-cm wingspan was displayed at a robotics conference, in 2008 the U.S. Air Force released a simulated video showing MAVs about the size of bumblebees, and in 2012 engineers at Johns Hopkins University were studying the flight of butterflies to “help small airborne robots mimic these maneuvers.”

The image in the initial post is not a mock-up, it's an operational prototype. Note there's a YouTube video of it flying. The university prototype requires a wire to provide power, doesn't have any sensor, doesn't have an on-board computer. The second prototype, the one that swims, is "175 miligrams, about 90mg heavier than previous designs". I posted that because instead of carrying swimming stuff, it could carry 90mg of sensor/computer/power-source. Could RF power transmission provide enough power, yet be light enough? So a radio transmitter would be turned on in the greenhouse to power these robo-pollinators? Turn the radio off when robots are not needed.
The "mock-up" shows a battery. How heavy is a hearing-aid battery? Size 5 (PR5H, PR521, PR63) weighs 0.20 grams, or 200mg, 5.8mm diameter x 2.5mm high, 1.4 volt, 35mAh capacity. It's a primary battery, not rechargeable, but a start. John's Hopkins University RoboBee can carry 90mg, so that's not enough.
Last edited by RobertDyck (2018-03-20 02:07:38)
Offline
Like button can go here
#6 2018-03-20 03:33:27
- RobertDyck
- Moderator
- From: Winnipeg, Canada
- Registered: 2002-08-20
- Posts: 8,241
- Website
Re: Autonomous Flying Microrobots (RoboBees)
Silver Oxide battery 337 aka SR416SW is 4.8mm diameter x 1.65mm high, 0.12 grams (120mg), 1.55 volt, 7.5 mAh.
Panasonic lithium-ion "pin" battery: CG-320
3.5mm diameter, 20mm long, 3.75 volt, max charging voltage 4.20 volt, 13mAh capacity, 0.6 gram (600mg) weight.
Offline
Like button can go here
#7 2020-02-10 19:56:37
- SpaceNut
- Administrator
- From: New Hampshire
- Registered: 2004-07-22
- Posts: 29,743
Re: Autonomous Flying Microrobots (RoboBees)
We are going to be needing these RoboBees if things do not change.
Humans need bumble bees—and they are disappearing faster than we thought in which it dropped by an average of more than 30 percent
Bumble bees are large and furry as an adaptation to cold climates, decline among 66 different species found throughout North America and Europe: the projections incorporate each species’ individual temperature and precipitation tolerances, which are now increasingly challenged by a warming planet.
heat likely strains a bee’s metabolism and food sources.
Neonicotinoid pesticides, research shows, shorten a bumble bee’s flight and potentially hinder pollination.
like squash, tomatoes, and berries. Insect pollinators like bees facilitate the growth of 35 percent of global crops.
Offline
Like button can go here
#8 2021-09-15 06:19:54
- Mars_B4_Moon
- Member
- Registered: 2006-03-23
- Posts: 9,776
Re: Autonomous Flying Microrobots (RoboBees)
Autonomous Robot Swarms To Mine the Moon's Resources
https://www.novuslight.com/autonomous-r … 11898.html
A.I Automation for Space?
Offline
Like button can go here