New Mars Forums
You are not logged in.
- Topics: Active | Unanswered
Announcement
#1 Re: Life support systems » Potato » Today 14:35:57
here is some more from AI question
The primary toxins found in the green parts of the potato plant (Solanum tuberosum) are solanine and alpha-chaconine, which are glycoalkaloid poisons. These compounds are concentrated in the leaves, stems, sprouts, and green skin of the potato tuber, acting as a natural pesticide to resist insects and animals
Key Details About Potato Plant Toxins:
Toxins: The main toxins are alpha-solanine and alpha-chaconine, which are found in much higher concentrations in leaves and stems than in the tubers.
Green Coloration: When potatoes are exposed to light, they produce chlorophyll (the green color) and increase production of solanine.
Health Hazards: Consuming high levels of these toxins can cause vomiting, diarrhea, abdominal pain, headache, and in severe cases, death.
Symptoms: Signs of poisoning include gastrointestinal distress and a bitter taste, which serves as a warning sign.
Safety Tips: Peel green skin, remove eyes and sprouts, and avoid eating any part of the potato plant other than the edible, non-green tuber. Cooking does not destroy the toxins.

That explains why we peel them..
Nice find
#2 Re: Martian Politics and Economy » Where Mars Field of Dreams meets Capitalism » Today 14:17:45
So what's stopping man from being on mars has to do with more than cash.
Why we are not going to Mars
1. LOX/CH4 "can't deliver the mass" problem not because LOX/CH4 is incapable—it's because: is physically viable, but operationally expensive Cryogenic storage over long durations is hard (boiloff, insulation, active cooling). ISRU plants to make enough LOX/CH4 are heavy and power-hungry. A LOX/CH4 system big enough to land a heavy payload and then send it back is huge. When you size it honestly (EDL + ISRU + ascent), the mass and power spiral is brutal.
2. "Why hypergolic 'SRI-J is chemically possible, but infrastructure-heavy not just partially import hypergolics?"
• Import one component (e.g., MMH/UDMH)
• Try to make only the oxidizer (NTO) or vice versa
• Making NTO on Mars still needs a serious chemical plant (nitric acid, high-purity nitrogen, oxidation, distillation).
• Making hydrazine or methylated hydrazines is even worse—dangerous, complex, and infrastructure-heavy.
• If you import both NTO and MMH, you're back to: c Huge landed mass c Bigger EDL system c Bigger launch vehicle from Earth
3. So what's the real issue with LOX/CO new engine development + lower performance. LOX/CO looks attractive on paper because: Both 02 and CO can be made directly from C02 (no hydrogen needed). That simplifies ISRU: just C02 + power + high-temp electrolysis.
A. No heritage means years and a lot of money.
There are no flight-proven LOX/CO engines.
Full engine development program
Ground test campaigns o Reliability and ignition testing tn Mars-like conditions o Then qualify it for a critical ascent mission
B. Lower performance
CO has lower specific energy than CH4.
LOX/CO tsp is typically -280-300 s, vs -360 s tor LOX/CHa.
That means more propellant mass for the same Av heavier MAV * harder ED L.
C. Combustion and cooling challenges CO/02 combustion has:
Different flame temperature and kinetics than CH4/02
Potential combustion stability issues that need real testing.
Cooling and materials choices that aren't off-the-shelf.
D. Still cryogenic (or high-pressure) o CO boils at æ81 K, 02 at 90 K—both are still cryogenic.
Store them as cryogenic Liquids (boiloff, insulation, power) c As high-pressure gases (heavy tanks, lower density, more volume).
LOX/CO doesn't magically escape the storage problem—it just trades hydrogen logistics for
4. The core of what you're seeing
LOX/CH4: ISRU-friendly, high performance, but cryogenic and infrastructure-heavy.
Hypergolics: Great performance, storable, but must be mostly or fully imported.
LOX/CO: ISRU-simple, but no engines, lower performance, still cryogenic/HP.
#3 Re: Meta New Mars » Housekeeping » Today 14:07:34
still fighting the issues of the contractor not doing the work and taking deposits. The AG did not get a response from the contractor so they are kicking the can back to the superior court level to civil suit which all but the highest is that just at different money tiers.
#4 Re: Meta New Mars » Daily Recap - Recapitulation of Posts in NewMars by Day » Yesterday 18:27:06
Trying to do without prefilling of numbers being generated making use of excel and auto fill to do my best
starting post is carried from the previous days 3-09-2026 last number for the day 238451 - last post 238473
3-10-26 postings
WIKI Constructing things on Mars equipment needs
Forty 40 Ton Mars Delivery Mechanism
Forty 40 Ton Mars Delivery Mechanism
Forty 40 Ton Mars Delivery Mechanism
Forty 40 Ton Mars Delivery Mechanism
Forty 40 Ton Mars Delivery Mechanism
Wiki Toehold Mission
Wiki Toehold Mission
Wiki Toehold Mission
Wiki Toehold Mission
Wiki Toehold Mission
Why Artemis is “better” than Apollo.
Why Artemis is “better” than Apollo.
Jevons Paradox and Social Amplifiers and Reach
Jevons Paradox and Social Amplifiers and Reach
Jevons Paradox and Social Amplifiers and Reach
Martian Calender - I have created a martian calender...
Martian Calender - I have created a martian calender...
GW Johnson Postings and @Exrocketman1 YouTube videos
#5 Re: Meta New Mars » Daily Recap - Recapitulation of Posts in NewMars by Day » Yesterday 18:26:50
Trying to do without prefilling of numbers being generated making use of excel and auto fill to do my best
starting post is carried from the previous days 3-08-2026 last number for the day 238443 - last post 238450
3-9-26 posting
Martian Calender - I have created a martian calender...
Martian Calender - I have created a martian calender...
Martian Calender - I have created a martian calender...
Jevons Paradox and Social Amplifiers and Reach
Jevons Paradox and Social Amplifiers and Reach
Why Artemis is “better” than Apollo.
Why Artemis is “better” than Apollo.
Why Artemis is “better” than Apollo.
#6 Re: Exploration to Settlement Creation » Wiki Toehold Mission » 2026-03-10 18:18:56
How to deliver Mars cargo to the surface that's been delivered to orbit in the Cargo Bus
Mars EDL Architecture: HIAD-Only, Retroprop-Scaled, Two-Lander System
This is the cleaned, consolidated version of the system you are designing:
• No parachutes
• HIAD-only aero deceleration
• Retroprop engines sized to payload mass
• Two independent landers inside a 12 m x 30 m aerobrake bus
• PICA-X thickness adjusted per mission mass
• Payload mass directly drives heating, TPS thickness, and propellant needs
1. Aerobrake Bus (12 m × 30 m)
Geometry
• Diameter: 12 m
• Length: 30 m
• Entry attitude: broadside / belly-first
• TPS: PICA-X monolithic belly, thickness adjusted per mission
• Control: 4 large flaps + RCS
• Role: remove the majority of entry energy, deliver landers to a slower regime
Mass
• Structure + flaps: 20–24 t
• PICA-X belly (single-use): 5.5–6 t
• Avionics + RCS: ~1 t
• Total bus mass: 26–30 t
Function
The bus replaces the traditional backshell + parachute system.
It provides:
• Very low ballistic coefficient
• Controlled lift vectoring
• Gentle heating environment for the landers
• A common entry vehicle for multiple mission profiles
2. Two Independent Landers Inside the Bus
Each lander is a complete system:
• 12 m HIAD (no parachute)
• Retroprop engines sized to lander mass
• Telescoping landing legs
• Exhaust shielding
• Integrated structure (no sky crane)
• Cygnus-class payload module inside
Typical Lander Mass Target: 30 t
Breakdown:
• Cygnus-like payload module (full): ~7 t
• Engines: 1–1.5 t
• Tanks + feed system: 2–3 t
• Landing propellant: 10–12 t
• Structure + legs: 5–6 t
• Avionics + shielding: ~1 t
Total per lander: 30 t
Two landers = 60 t inside the bus.
3. HIAD Only Deceleration (No Parachutes)
Each lander uses a 12 m HIAD:
• Area: ~113 m²
• CD ~1.5
• Ballistic coefficient for a 30 t lander:
β ≈ 177 kg/m² (Mars-friendly)
The HIAD handles:
• Hypersonic deceleration
• Supersonic deceleration
• Subsonic stabilization
No parachutes are used.
4. Retropropulsion Scaled to Payload Mass
After HIAD deceleration, each lander performs:
• Terminal retropropulsion
• Hover
• Translation
• Soft touchdown
Propellant mass scales directly with:
• Lander mass
• Required Δv
• Engine ISP
More payload → more propellant → higher total mass → higher β → thicker TPS.
This is the core mass spiral.
5. Why This Architecture Works
Advantages
• Two complete landers delivered in one entry vehicle
• No parachutes (removes a major failure mode)
• HIAD-only simplifies staging and reduces mass overhead
• Retroprop engines integrated into the lander (no crane)
• Bus provides a common aero solution for multiple missions
• PICA-X thickness can be tuned per mission mass
Scalability
• Full-mass mission: two 30 t landers
• Partial-mass mission: one full + one light lander
• Bus TPS thickness adjusts to total entry mass
• HIAD size remains fixed at 12 m for each lander
6. What You Gain Compared to NASA’s Current Method
NASA today:
• One payload per aeroshell
• Parachutes required
• Sky crane required
• ~1 t landed mass
Your architecture:
• Two landers per entry
• No parachutes
• No crane
• 30 t per lander
• HIAD + retroprop only
• Scalable to human-class missions
7. Summary (Forum Ready)
Aerobrake Bus: 12 m × 30 m, 26–30 t, PICA-X belly, 4 flaps
Landers: Two independent 30 t units
Deceleration: HIAD-only, no parachutes
Landing: Retroprop engines sized to payload mass
Payload: Cygnus-class module per lander (~7 t real cargo)
Flexibility: Full or partial mass missions with only TPS thickness changes
Capability: 60 t total landed mass per entry event
#7 Re: Exploration to Settlement Creation » Wiki Toehold Mission » 2026-03-10 17:56:19
Here is how Cygnus is sent to orbit cargo bus.

So if we modify this for mars is a means to send them.
12‑Meter Mars Aerobrake Bus (Scaled ×3) — Clean Spec Sheet
A dimensionally scaled evolution of a 4‑meter fairing. Future missions may use smaller variants.
1. Geometry (Scaled ×3 from 4 m → 12 m)
Outside diameter: 12 m
Length: 30 m
Internal usable diameter: ~11.3 m
Internal usable length: ~28 m
Broadside projected area: ~360 m²
Belly TPS area (half‑cylinder): ~565 m²
2. Mass Statement (Disposable EDL Shell)
Structure + flaps: 20–24 t
PICA‑X belly TPS (single‑use, ~10 kg/m²): 5.5–6 t
Avionics + RCS + harness: ~1 t
Total dry mass (bus only): 26–30 t
3. Starship‑Style Flap System (Scaled to 12 m Body
4 flaps total (2 forward, 2 aft)
Span: 5–6 m from surface
Root chord: 6–7 m
Functions:
Trim and stability in broadside attitude
Lift vector control (downrange/crossrange)
Pitch/yaw authority
Roll via differential deflection
4. Control Systems
IMU + GNSS + star tracker
Mars EDL guidance law
RCS thrusters for high‑altitude control
Flap actuation: hydraulic or electro‑mechanical
Redundant power + signal paths
No landing engines, no landing legs, no thrust structures
5. Mission Role: Aerobrake Bus for Heavy Payloads
Single‑use Mars entry shell
Bleeds off most kinetic energy during entry
Payload separates at target Mach/altitude
Payload performs its own EDL (chutes, inflatables, retroprop, etc.)
Payload attaches to central spine or deck
Designed for entry loads only
6. Ballistic Coefficient Check
Reference area: 360 m²
CD (broadside): ~1.5
Target β: 150–250 kg/m²
Total mass capability: ~100–110 t
Subtract bus mass (26–30 t)
Payload capability: ~70–80 t
7. Scaling Down for Future Missions
12 m × 30 m is the upper envelope
Payload geometry may drive:
Shorter bus (e.g., 24 m)
Smaller diameter (e.g., 10 m)
Different CG placement
Adjusted flap sizing
Thinner TPS
Modular architecture:
Central spine
Ring frames
Standard payload attach zone
Four‑flap layout
Monolithic belly TPS
Summary
Geometry: 12 m × 30 m
Dry mass: 26–30 t
TPS: 5.5–6 t PICA‑X belly
Control: 4 flaps + RCS + GNC
Role: Entry‑only aerobrake bus
Payload capability: ~70–80 t
Future missions may shrink the design as payloads mature
#8 Re: Exploration to Settlement Creation » Wiki Landing Site preparation mission » 2026-03-10 17:38:42
Here is the list and shape that we are forced to use.
Caterpillar Electric Prototypes
Cat 301.9 Electric
(Dimensions match diesel 301.9 platform; electric variant uses same chassis)
Length: 3,840 mm / 151 in
Width: 990 mm / 39 in
Height: 2,300 mm / 91 in
Operating Weight: 2,000 kg / 4,400 lb
Cat 320 Electric
(Electric prototype uses 320 chassis dimensions)
Length: 9,400 mm / 370 in
Width: 2,990 mm / 118 in
Height: 3,160 mm / 124 in
Operating Weight: 22,000 kg / 48,500 lb
Cat 950 GC Electric (Prototype)
(Electric prototype uses 950 GC chassis dimensions)
Length: 6,180 mm / 243 in
Width: 2,410 mm / 95 in
Height: 3,330 mm / 131 in
Operating Weight: 18,800 kg / 41,450 lb
Cat 906 Electric
(Electric prototype uses 906 chassis dimensions)
Length: 5,040 mm / 198 in
Width: 1,870 mm / 74 in
Height: 2,680 mm / 105 in
Operating Weight: 5,730 kg / 12,630 lb
Bobcat Electric Machines
Bobcat T7X (Electric Track Loader)
Length: 3,600 mm / 142 in
Width: 1,800 mm / 71 in
Height: 2,080 mm / 82 in
Operating Weight: 5,710 kg / 12,590 lb
Bobcat S7X (Electric Skid Steer)
(Dimensions match S770 frame)
Length: 3,500 mm / 138 in
Width: 1,800 mm / 71 in
Height: 2,080 mm / 82 in
Operating Weight: 3,900 kg / 8,600 lb
Bobcat E10e (Electric Micro Excavator)
Length: 2,820 mm / 111 in
Width: 710–1,100 mm / 28–43 in
Height: 2,210 mm / 87 in
Operating Weight: 1,200 kg / 2,650 lb
Bobcat E19e (Electric Mini Excavator)
Length: 3,830 mm / 151 in
Width: 980 mm / 39 in
Height: 2,300 mm / 91 in
Operating Weight: 1,916 kg / 4,225 lb
Volvo Electric Machines
Volvo ECR18 Electric
Length: 3,430 mm / 135 in
Width: 995–1,352 mm / 39–53 in
Height: 2,298 mm / 91 in
Operating Weight: 1,790–1,870 kg / 3,950–4,120 lb
Volvo EC18 Electric
Length: 3,550 mm / 140 in
Width: 995–1,352 mm / 39–53 in
Height: 2,300 mm / 91 in
Operating Weight: 1,960 kg / 4,321 lb
Volvo L20 Electric (Compact Wheel Loader)
Length: 5,265 mm / 207 in
Width: 1,740 mm / 69 in
Height: 2,580 mm / 102 in
Operating Weight: 4,500 kg / 9,920 lb
Volvo L25 Electric (Compact Wheel Loader)
Length: 5,265 mm / 207 in
Width: 1,740 mm / 69 in
Height: 2,580 mm / 102 in
Operating Weight: 5,000 kg / 11,000 lb
Volvo EC230 Electric (Medium Excavator)
Length: 9,700 mm / 382 in
Width: 2,990–3,090 mm / 118–122 in
Height: 3,100 mm / 122 in
Operating Weight: 23,000–26,100 kg / 50,600–57,500 lb
#9 Re: Exploration to Settlement Creation » WIKI Constructing things on Mars equipment needs » 2026-03-10 17:38:02
Here is the list and shape that we are forced to use.
Caterpillar Electric Prototypes
Cat 301.9 Electric
(Dimensions match diesel 301.9 platform; electric variant uses same chassis)
Length: 3,840 mm / 151 in
Width: 990 mm / 39 in
Height: 2,300 mm / 91 in
Operating Weight: 2,000 kg / 4,400 lb
Cat 320 Electric
(Electric prototype uses 320 chassis dimensions)
Length: 9,400 mm / 370 in
Width: 2,990 mm / 118 in
Height: 3,160 mm / 124 in
Operating Weight: 22,000 kg / 48,500 lb
Cat 950 GC Electric (Prototype)
(Electric prototype uses 950 GC chassis dimensions)
Length: 6,180 mm / 243 in
Width: 2,410 mm / 95 in
Height: 3,330 mm / 131 in
Operating Weight: 18,800 kg / 41,450 lb
Cat 906 Electric
(Electric prototype uses 906 chassis dimensions)
Length: 5,040 mm / 198 in
Width: 1,870 mm / 74 in
Height: 2,680 mm / 105 in
Operating Weight: 5,730 kg / 12,630 lb
Bobcat Electric Machines
Bobcat T7X (Electric Track Loader)
Length: 3,600 mm / 142 in
Width: 1,800 mm / 71 in
Height: 2,080 mm / 82 in
Operating Weight: 5,710 kg / 12,590 lb
Bobcat S7X (Electric Skid Steer)
(Dimensions match S770 frame)
Length: 3,500 mm / 138 in
Width: 1,800 mm / 71 in
Height: 2,080 mm / 82 in
Operating Weight: 3,900 kg / 8,600 lb
Bobcat E10e (Electric Micro Excavator)
Length: 2,820 mm / 111 in
Width: 710–1,100 mm / 28–43 in
Height: 2,210 mm / 87 in
Operating Weight: 1,200 kg / 2,650 lb
Bobcat E19e (Electric Mini Excavator)
Length: 3,830 mm / 151 in
Width: 980 mm / 39 in
Height: 2,300 mm / 91 in
Operating Weight: 1,916 kg / 4,225 lb
Volvo Electric Machines
Volvo ECR18 Electric
Length: 3,430 mm / 135 in
Width: 995–1,352 mm / 39–53 in
Height: 2,298 mm / 91 in
Operating Weight: 1,790–1,870 kg / 3,950–4,120 lb
Volvo EC18 Electric
Length: 3,550 mm / 140 in
Width: 995–1,352 mm / 39–53 in
Height: 2,300 mm / 91 in
Operating Weight: 1,960 kg / 4,321 lb
Volvo L20 Electric (Compact Wheel Loader)
Length: 5,265 mm / 207 in
Width: 1,740 mm / 69 in
Height: 2,580 mm / 102 in
Operating Weight: 4,500 kg / 9,920 lb
Volvo L25 Electric (Compact Wheel Loader)
Length: 5,265 mm / 207 in
Width: 1,740 mm / 69 in
Height: 2,580 mm / 102 in
Operating Weight: 5,000 kg / 11,000 lb
Volvo EC230 Electric (Medium Excavator)
Length: 9,700 mm / 382 in
Width: 2,990–3,090 mm / 118–122 in
Height: 3,100 mm / 122 in
Operating Weight: 23,000–26,100 kg / 50,600–57,500 lb
#10 Re: Interplanetary transportation » Forty 40 Ton Mars Delivery Mechanism » 2026-03-10 17:36:15
Here is the list and shape that we are forced to use.
Caterpillar Electric Prototypes
Cat 301.9 Electric
(Dimensions match diesel 301.9 platform; electric variant uses same chassis)
Length: 3,840 mm / 151 in
Width: 990 mm / 39 in
Height: 2,300 mm / 91 in
Operating Weight: 2,000 kg / 4,400 lb
Cat 320 Electric
(Electric prototype uses 320 chassis dimensions)
Length: 9,400 mm / 370 in
Width: 2,990 mm / 118 in
Height: 3,160 mm / 124 in
Operating Weight: 22,000 kg / 48,500 lb
Cat 950 GC Electric (Prototype)
(Electric prototype uses 950 GC chassis dimensions)
Length: 6,180 mm / 243 in
Width: 2,410 mm / 95 in
Height: 3,330 mm / 131 in
Operating Weight: 18,800 kg / 41,450 lb
Cat 906 Electric
(Electric prototype uses 906 chassis dimensions)
Length: 5,040 mm / 198 in
Width: 1,870 mm / 74 in
Height: 2,680 mm / 105 in
Operating Weight: 5,730 kg / 12,630 lb
Bobcat Electric Machines
Bobcat T7X (Electric Track Loader)
Length: 3,600 mm / 142 in
Width: 1,800 mm / 71 in
Height: 2,080 mm / 82 in
Operating Weight: 5,710 kg / 12,590 lb
Bobcat S7X (Electric Skid Steer)
(Dimensions match S770 frame)
Length: 3,500 mm / 138 in
Width: 1,800 mm / 71 in
Height: 2,080 mm / 82 in
Operating Weight: 3,900 kg / 8,600 lb
Bobcat E10e (Electric Micro Excavator)
Length: 2,820 mm / 111 in
Width: 710–1,100 mm / 28–43 in
Height: 2,210 mm / 87 in
Operating Weight: 1,200 kg / 2,650 lb
Bobcat E19e (Electric Mini Excavator)
Length: 3,830 mm / 151 in
Width: 980 mm / 39 in
Height: 2,300 mm / 91 in
Operating Weight: 1,916 kg / 4,225 lb
Volvo Electric Machines
Volvo ECR18 Electric
Length: 3,430 mm / 135 in
Width: 995–1,352 mm / 39–53 in
Height: 2,298 mm / 91 in
Operating Weight: 1,790–1,870 kg / 3,950–4,120 lb
Volvo EC18 Electric
Length: 3,550 mm / 140 in
Width: 995–1,352 mm / 39–53 in
Height: 2,300 mm / 91 in
Operating Weight: 1,960 kg / 4,321 lb
Volvo L20 Electric (Compact Wheel Loader)
Length: 5,265 mm / 207 in
Width: 1,740 mm / 69 in
Height: 2,580 mm / 102 in
Operating Weight: 4,500 kg / 9,920 lb
Volvo L25 Electric (Compact Wheel Loader)
Length: 5,265 mm / 207 in
Width: 1,740 mm / 69 in
Height: 2,580 mm / 102 in
Operating Weight: 5,000 kg / 11,000 lb
Volvo EC230 Electric (Medium Excavator)
Length: 9,700 mm / 382 in
Width: 2,990–3,090 mm / 118–122 in
Height: 3,100 mm / 122 in
Operating Weight: 23,000–26,100 kg / 50,600–57,500 lb
#11 Re: Interplanetary transportation » Forty 40 Ton Mars Delivery Mechanism » 2026-03-10 13:59:55
Thar means pulling apart the items we are trying to ship complete, whole in order to drive them out and begin working as the data in post 70 indicates.
#12 Re: Human missions » Why Artemis is “better” than Apollo. » 2026-03-09 17:26:32
Sounds like they are trying to get rid of the standing support army concept as well, to go down the path of commercial industry.
#13 Re: Interplanetary transportation » Forty 40 Ton Mars Delivery Mechanism » 2026-03-09 17:12:07
Connex box size for the equipment is a cause for the heatshield issues not just from mars EDL but also for the assembly to get from earth surface or from orbit. It did suggest lining the connex box with respect to the plume of engine once they are in heavy thrust to land.
Our issues for mars is that anything that approaches that 9 M diameter gives issues for the envelope shape for mars entry.
This is also the issue for horizontal Cygnus landings as well.
#14 Re: Exploration to Settlement Creation » Wiki Toehold Mission » 2026-03-09 14:32:43
CYGNUS‑TO‑MARS SURFACE MODULE — ENGINEERING CONVERSION SPEC
1. Base Structure
Starting point: Northrop Grumman Cygnus PCM (Pressurized Cargo Module)
Modifications for Mars:
Reinforced pressure shell (2× safety factor for burial loads)
External regolith‑anchor hardpoints
Dust‑proofed hatches and seals
Thermal insulation for −120°C nights
Integrated skirt for partial burial
Replaceable micrometeoroid shield with regolith‑compatible armor
2. Environmental Control & Life Support (ECLSS)
ISS‑heritage racks adapted for Mars:
CO₂ scrubbers (amine‑swing or LiOH backup)
O₂ storage tanks
Water recycling (ISS‑derived WRS)
Humidity control
Air circulation fans rated for dusty environments
Emergency O₂ candles
Mars‑specific additions:
Dust‑exclusion vestibule
External air intake for ISRU oxygen feed
Thermal loop compatible with reactor heat rejection
3. Power & Thermal Systems
ISS heritage:
120 VDC bus
Modular power distribution units
Mars upgrades:
External reactor interface (SAFE‑400 / Kilopower)
Radiator panels with dust‑shedding coating
Battery racks (LiFePO₄ or Na‑ion)
Solar pallet connectors
Thermal mass integration for buried operation
4. Mobility & Landing Adaptation
Cygnus is not designed to land — so the Mars version is:
Mounted inside a lifting‑body aeroshell
Equipped with crushable landing legs
Designed for horizontal landing orientation
Includes regolith‑compatible access ramps
5. Internal Layout Options
Each Cygnus‑Mars module can be configured as:
A. Habitation Module
bunks
galley
hygiene
medical bay
water recycling
B. ISRU Module
MOXIE‑class O₂ production
Sabatier reactor
CO₂ compressors
electrolysis stack
methane/O₂ storage
C. Power Module
reactor interface
battery racks
switchgear
radiator controls
D. Greenhouse Module
hydroponics racks
LED arrays
nutrient tanks
humidity control
E. Utility / Workshop Module
EVA airlock
machining tools
welding gear
teleoperation consoles
3D printer (low‑energy use only)
6. Surface Integration
Each module includes:
buried‑operation thermal skirt
regolith berm anchor points
tunnel connectors (inflatable or rigid)
utility ports (power, water, O₂, data)
external robotic arm interface
7. Mass & Volume
Dry mass: 4.5–5.5 tonnes
Fully outfitted: 6–7.5 tonnes
Delivered inside lander: 8–10 tonnes including aeroshell
Fits within:
Starship cargo bay
Blue Moon cargo lander
Mars lander concepts (10–15 t class)
Cygnus‑to‑Mars Conversion Spec (Surface‑Rated ISS‑Heritage Modules)
To make the toehold feel real, each pressurized module delivered to Mars is based on a Cygnus‑class ISS cargo module, modified for surface operations.
1. Structural Modifications
Reinforced pressure shell for burial loads
Dust‑proofed hatches and seals
Thermal insulation for −120°C nights
Regolith‑anchor hardpoints
Replaceable micrometeoroid shield with regolith‑compatible armor
2. Life Support Integration
ISS‑heritage systems adapted for Mars:
CO₂ scrubbers
O₂ storage
Water recycling
Humidity control
Dust‑exclusion vestibule
External ISRU oxygen feed
3. Power & Thermal
SAFE‑400 / Kilopower interface
Radiator panels with dust‑shedding coating
Battery racks
Solar pallet connectors
Thermal mass integration for buried operation
4. Landing Adaptation
Horizontal landing orientation
Crushable landing legs
Lifting‑body aeroshell
Regolith‑compatible access ramps
5. Internal Configurations
Each Cygnus‑Mars module can be configured as:
Habitation Module
ISRU Module
Power Module
Greenhouse Module
Utility / Workshop Module
6. Surface Integration
Tunnel connectors
Utility ports (power, water, O₂, data)
External robotic arm interface
Regolith berm anchor points
7. Mass & Volume
6–7.5 tonnes outfitted
8–10 tonnes delivered with aeroshell
Compatible with 10–15 t Mars landers
#15 Re: Exploration to Settlement Creation » Wiki Toehold Mission » 2026-03-09 14:28:57
Now to put what is the first Cygnus iss module style system on mars
The Mars Toehold Mission: What Actually Gets Sent (Cygnus / ISS‑Style Modules)
Below is a clean, non‑duplicated, mission‑ready manifest of what gets delivered to Mars using Mars‑hardened Cygnus‑class modules and ISS‑heritage systems.
This is the missing bridge between your reorganized document and the physical reality of the first landing.
1. The Five Core Cygnus‑Derived Modules
These are the backbone of your toehold — the “ISS on Mars” aesthetic you’ve been building.
Each is a pressurized, surface‑rated, buried‑capable module.
1. Core Habitation Module (Cygnus‑Hab)
Purpose: living, sleeping, hygiene, medical, galley
ISS analog: Destiny + Zvezda hybrid
Contents:
bunks for 10–12
hygiene + toilet
medical bay
galley + food prep
water recycling
CO₂ scrubbing
emergency O₂ storage
2. Life Support & ISRU Module (Cygnus‑ISRU)
Purpose: oxygen, water, methane, storage
ISS analog: ECLSS + Sabatier rack
Contents:
MOXIE‑class O₂ production
Sabatier reactor
CO₂ compressors
water extraction skid
electrolysis stack
methane + O₂ tanks
radiator panels
3. Power & Thermal Module (Cygnus‑Power)
Purpose: nuclear + solar + batteries
ISS analog: P6 truss logic, but compact
Contents:
SAFE‑400 or Kilopower reactor
battery racks
power distribution
thermal loops
radiator wings
solar array pallets
4. Greenhouse Module (Cygnus‑Ag)
Purpose: food, oxygen, humidity, psychology
ISS analog: Veggie + MELiSSA concepts
Contents:
hydroponics racks
LED arrays
nutrient tanks
humidity control
seed vault
plant growth chambers
5. Airlock & Workshop Module (Cygnus‑Utility)
Purpose: EVA, tools, machining, robotics
ISS analog: Quest + PMM hybrid
Contents:
EVA airlock
suit maintenance
machining tools
welding gear
3D printer (low‑energy use only)
tool racks
teleoperation consoles
2. The Unpressurized Cargo Modules
These are the “garage” and “warehouse” of the toehold.
6. Rover & Digger Module
Carries:
1 compact excavator (Bobcat E19e or Cat 301.9 Electric)
1 skid‑steer loader
1 teleoperated robotic arm
modular tool attachments
spare treads, hydraulics, batteries
7. Greenhouse Expansion Kit
Carries:
inflatable greenhouse shells
regolith‑glass panel kits
irrigation lines
soil trays
water tanks
8. Power Expansion Kit
Carries:
solar pallets
battery pallets
cabling
switchgear
radiator extensions
9. Construction & Shielding Kit
Carries:
regolith bags
basalt fiber reels
inflatable tunnel segments
pressure‑rated connectors
structural frames
3. The Landing Sequence (No Duplication, Clean Logic)
Phase 0 — Automated Precursor (Year −2 to −1)
ISRU Lander
MOXIE
Sabatier
compressors
tanks
small reactor
Power Lander
SAFE‑400
solar pallets
batteries
Survey Rover
terrain mapping
ice detection
landing beacon deployment
Phase 1 — Heavy Cargo (Year −1 to 0)
Cygnus‑ISRU Module
Cygnus‑Power Module
Rover & Digger Module
Construction & Shielding Kit
These four landers create the pre‑crew industrial base.
Phase 2 — Crew Arrival (Year 0)
Cygnus‑Hab Module
Cygnus‑Utility Module
Pressurized Rover
Crew of 10–12 arrives only when:
oxygen is being produced
methane is being produced
water is being extracted
power is stable
Phase 3 — Toehold Construction (Year 0–1)
Crew tasks:
bury Cygnus modules
trench for tunnels
deploy greenhouses
expand power
build regolith berms
assemble workshop
establish water lines
build first storage rooms
Phase 4 — Foothold Expansion (Year 1–3)
Cygnus‑Ag Module
Greenhouse Expansion Kit
Power Expansion Kit
This is where the settlement becomes productive, not just surviving.
4. Why This Makes the Toehold Feel Real
Because it uses:
real hardware (Cygnus, ISS racks, SAFE‑400, Bobcat E19e)
real dimensions (fits in landers, fits in 8×8 CONEX)
real mass budgets (Cygnus‑class payloads)
real operational logic (bury modules, trench tunnels, deploy greenhouses)
real ISRU (MOXIE, Sabatier, electrolysis)
This is not fantasy.
This is a credible, buildable, NASA‑heritage Mars toehold.
#16 Exploration to Settlement Creation » Wiki Toehold Mission » 2026-03-09 14:22:05
- SpaceNut
- Replies: 8
The content has been consolidated and remastered from my posts
1. Zubrin’s Dream (The Why)
Humans living permanently on Mars, building a new branch of civilization where people:
work
raise families
build industries
create culture
stay
This is the philosophical anchor for everything that follows.
2. The Toehold Architecture (The First Step)
A minimal landing that refuses to die.
Core Elements
4–8 settlers
pre‑landed supplies
underground shelter
first greenhouse
first power systems
first water extraction
first oxygen production
first construction capability
Why it matters
Every kilogram matters
Every watt matters
Every greenhouse panel matters
Every tool matters
The toehold is a survival experiment, not a colony.
3. The Foothold Economy (The First Expansion)
Once the toehold survives, it begins producing:
8–16 settlers
mining output
metals
plastics
agriculture
energy storage
recycling
construction materials
This is where the settlement becomes productive, not just surviving.
4. Mars Homestead Model (Minimal Imports, Maximum ISRU)
A philosophy of early settlement:
Send as little as possible
Build as much as possible
Use local materials (glass, metals, plastics)
Use ambient light where possible
Use tempered regolith glass
Robots + settlers build everything
Baseline Homestead Setup
12 settlers
4 Mars Direct habs
2 small greenhouses per hab
Large greenhouses built from Mars glass
Ambient + artificial light mix
5. Historical Parallel: Toehold → Foothold → Settlement
Early Earth colonies followed the same pattern:
tiny, fragile presence
dependent on home
high mortality
no guarantee of survival
Mars is no different.
6. Daily Reality of the First Crew
Breakdown of the first 24 hours:
4–8 hours sleep
3 hours meals
1–2 hours hygiene
1–2 hours exercise
2–3 hours maintenance
2–3 hours travel
4–6 hours productive work
This is why early focus is on:
water
air
power
shelter
heat
food
waste
mobility
7. Pre‑Landing Strategy (10‑Year Supply Cascade)
Everything possible is pre‑landed:
habitats
greenhouses
power systems
water systems
food stores
tools
rovers
diggers
batteries
solar panels
medical supplies
spare parts
mining equipment
ISRU systems
construction materials
8. Mission Architecture (2033–2035 Toehold Era)
A. Pre‑positioned Return Vehicles (ERVs)
Landed 1–2 years before crew
Powered by nuclear/RTG
Produce methane + oxygen experimentation, practical storing
Prove ISRU before humans arrive
B. Pre‑positioned Reactors
SAFE‑400
Kilopower
RTGs
C. Pre‑positioned Greenhouses
Hard‑panel or inflatable
Hydroponics
First oxygen + food
D. Pre‑positioned Rovers & Hangars
long‑range rovers
ATVs
loaders
burial + construction tools
E. Crew Arrives Only After ISRU Works
This is the core of Mars Direct.
9. Mission Timeline
2033–2035: Exploration Toehold
ERV + reactor + MOXIE
Rover hangar + tuna‑can habitat
Crew of 4
Return to Earth
10. Tools (The Forgotten Lifeline)
battery tools
dry‑ice pneumatic tools
hand tools
welding gear
machining capability
3D printing (only when energy‑efficient)
11. Greenhouses (The First True Toehold)
Provide:
food
oxygen
humidity
psychological comfort
biological recycling
12. Energy (The Limiting Factor)
Solar, weak, dust storms use to supplement nuclear systems
battery‑dependent surge and backups
Nuclear
SAFE‑400 not in the toehold but later
Kilopower
RTGs
Storage
methane
ammonia
compressed gas
batteries
13. Structures (Build Fast, Build Redundant)
cut‑and‑cover
basalt fiber
PLA bioplastic
inflatable habitats
underground tunnels
water + regolith shielding
No cathedrals on Sol 1 — only bunkers.
14. Construction Methods with most as trial type experimentation
Basalt Fiber
pressure vessels
beams
insulation
textiles
Regolith Bricks
shielding
thermal mass
walls
Inflatable Habitats
fast deployment
covered with regolith
3D‑Printed Domes
modular
scalable
repairable
Robotic Bricklayers
continuous construction
low labor cost
15. The 27 - 40 Tonne Toehold Manifest tonnage not set in stone but a ball park
Includes: with some that will not make it into the toehold
airlocks
gas cylinders
food
water
recycling units
Sabatier
solar panels
digger
rovers
habitats
hydroponics
tools
medical supplies
mining equipment
batteries
communications
16. Phase 0–4 Mission Flow
Phase 0: Automated Precursor
rover survey
landing beacons
Mars GPS constellation
Phase 1: Cargo Delivery
life support + power
construction + mining
habitation
propellant plant
pressurized rover
Phase 3: Toehold Construction
trenching
berms
underground rooms
LED greenhouses
utility tunnels
Phase 4: Life Support & Cleaners
peroxide
vinegar
bleach
alcohols
17. The Nomadic Prospector Model
Essential for:
exploration
mapping
mineral claims
water scouting
cave identification
future evaluation
emergency rescue
logistics
This model feeds the a system for growth.
18. Food Logistics changes with crew actual but this is a target for (10–12 Crew)
26 months of food ≈ 12 tons
With Mars water: ~9 tons
With 15% ISRU fresh food: ~8.65 tons
Bulk food imported
Fresh food grown locally
#17 Re: Interplanetary transportation » Forty 40 Ton Mars Delivery Mechanism » 2026-03-09 14:05:12
Here is the equipment list that we are trying to shove into a connex box that means we can not drive them out as we need to break them down.
Battery‑Electric Prototypes (Bauma 2022)
Cat 301.9 Electric
Type: Mini excavator
Status: Prototype, fully battery‑powered
Cat 320 Electric
Type: Medium excavator
Status: Prototype, closest to Mars‑scale digger
Cat 950 GC Electric Wheel Loader
Type: Wheel loader
Status: Prototype, high‑power earth‑moving
Cat 906 Electric
Type: Compact wheel loader
Status: Prototype, light construction
Are any Caterpillar machines “Mars‑ready”?
Extreme‑cold battery chemistry needed
Full dust‑proofing for Martian regolith
Radiation‑hardened electronics
Lightweight redesign for launch mass limits
Solar/nuclear charging infrastructure
8×8 CONEX Internal Dimensions
Width: ~92 in
Height: ~94 in
Length: ~19 ft 4 in
Caterpillar Electric Machines vs 8×8 Fit
Cat 301.9 Electric
Width: ~39 in
Height: ~90 in
Fits 8×8: YES
Cat 906 Electric
Width: ~70 in
Height: ~98 in
Fits 8×8: NO (too tall)
Cat 320 Electric
Width: ~102 in
Height: ~118 in
Fits 8×8: NO
Cat 950 GC Electric Wheel Loader
Width: ~112 in
Height: ~138 in
Fits 8×8: NO
Cat 301.9 Electric — The Only One That Fits
Width: 39 in
Height: ~90 in
Length: ~12 ft
Capabilities:
Light excavation
Trenching
Regolith handling
Teleoperation (Caterpillar Command)
Limitations:
Not for heavy earth‑moving
Not for bulldozing
Not for large‑scale site prep
Cat 906 Electric — Too Tall
Width fits
Height fails by ~4 in
Could fit with cab removal or redesign
Cat 320 Electric — Too Wide & Too Tall
Width: 102 in (fails)
Height: 118 in (fails)
Cat 950 GC Electric — Far Too Large
Width: 112 in
Height: 138 in
Implications for Mars Construction
Only the 301.9 fits stock
All larger Caterpillar electrics exceed 8×8 constraints
Your Options
1. Multiple Cat 301.9 units
Distributed digging
Easy to ship
Easy teleoperation
Low mass
2. Custom Caterpillar‑style chassis
Cab removed
Fold‑down ROPS
Narrow‑track variants
Modular boom assemblies
3. Flat‑pack approach
Ship components inside CONEX
Assemble on Mars with robotics
4. Use Caterpillar Command autonomous tech
Proven in remote, dusty, hazardous sites
Ideal for Mars teleoperation
Summary Table (Clean)
Cat 301.9 Electric
Fits: YES
Notes: Only electric Cat that fits stock
Cat 906 Electric
Fits: NO
Notes: Too tall by ~4 in
Cat 320 Electric
Fits: NO
Notes: Too wide & tall
Cat 950 GC Electric
Fits: NO
Notes: Far too large
Bobcat Electric Machines vs 8×8
T7X (Track loader)
Width: ~68 in
Height: ~80 in
Fits: YES
S7X (Skid steer)
Width: ~68 in
Height: ~80 in
Fits: YES
E10e (Micro excavator)
Width: 28–44 in
Height: ~87 in
Fits: YES
E19e (Mini excavator)
Width: ~39 in
Height: ~90 in
Fits: YES
Volvo Electric Machines vs 8×8
ECR18 (Mini excavator)
Width: ~39 in
Height: ~90 in
Fits: YES
EC18 (Mini excavator)
Width: ~39 in
Height: ~90 in
Fits: YES
L20 Electric (Compact wheel loader)
Width: ~63 in
Height: ~98 in
Fits: NO (too tall)
L25 Electric (Compact wheel loader)
Width: ~63 in
Height: ~98 in
Fits: NO (too tall)
EC230 (Medium excavator)
Width: >100 in
Height: >110 in
Fits: NO
Battery-Electric Prototypes (Bauma 2022)
Source: Caterpillar press release
Model Type Status Notes
Cat 301.9 Electric Mini excavator Prototype Fully battery-powered
Cat 320 Electric Medium excavator Prototype Closest to a Mars-scale digger
Cat 950 GC Electric Wheel loader Prototype High-power earth-moving
Cat 906 Electric Compact wheel loader Prototype Light construction
These machines use Caterpillar's new Li-ion battery packs and onboard chargers. They are designed for construction sites on Earth, not extreme environments.
Are any Caterpillar machines "Mars-ready"?
Not yet. Even the electric prototypes would need major upgrades:
What's missing:
• Extreme cold battery chemistry Full dust-proofing for Martian regolith
• Radiation-hardened electronics
• Lightweight design for launch mass limits
• Solar/nuc[ear charging infrastructure
NASA's telerobotics studies (e.g., ATHLETE, RASSOR) show the direction, but Caterpillar hasn't built a Mars-rated machine.
Dimensions of an 8x8 CONEX Box (Internal)
A standard (actually 8x8x20) container has:
• Interior width: 42 in (7.7 ft) Interior height: æ94 in (7.8 ft)
• Interior length: N19 ft 4 in
Your limiting factors are width and height.
Caterpillar Electric Machines (from the Caterpillar electric lineup)
These are the four battery-electric machines Caterpillar has publicly demonstrated.
Model Type Width Height Fits in 8x8?
Cat 301.9 Electric Mini excavator N39 in N90 in YES
Cat 906 Electric Compact wheel loader in æ98 in NO (too tall)
Cat 320 Electric Medium excavator in in NO
Cat 950 GC Electric Wheel loader M 12 in M38 in NO
Only the Cat 301.9 Electric fits inside an 8x8 container without modification.
Cat 301.9 Electric — Fits
This is the only Caterpillar electric machine that meets your dimensional constraints.
Why it fits:
Width: 39 in (3.25 ft)
Height: —90 in (7.5 ft)
Length: æl 2 ft (well within 20 ft container)
What it can do:
Light excavation Trenching
Regolith handling
Teleoperation possible (Caterpillar Command compatible with small machines)
What it cannot do:
Heavy earth-moving
Bulldozing
Large-scale site prep
This machine is a starter robot, not a base-building workhorse.
2. Cat 906 Electric — Too Tall
Width: æ70 in (fits)
Height: —98 in (8.16 ft) fails height limit bY N4 inches
Could it be modified to fit? Possibly — if the cab is removed or redesigned. But stock? No.
3. Cat 320 Electric —Too Wide & Too Tall
Width: 102 in (8.5 ft) + fails
Height: 118 in (9.8 ft) * fails
This is a serious excavator, but it's not container-friendly.
4. Cat 950 GC Electric — way Too Big
Width: 112 in
Height: 138 in
This is a non-starter for containerized transport.
What This Means for Mars Construction
If you want real earth-moving capability inside an footprint, Caterpillar's current electric lineup is too large except for the mini-excavator.
Your options:
1 . Use multiple Cat 301.9 Electric units Good for distributed digging
Easy to ship
Easy to teleoperate
Low mass
2. Request Caterpillar-style custom chassis o Cab removed
Fold-down ROPS
Narrow-track variants
Modular boom assemblies
3. Use a "flat-pack" approach
Ship components in the CONEX
o Assemble on Mars with robotic assistance
4. Use Caterpillar's autonomous mining tech (Command)
c Already proven in remote, dusty, dangerous environments c Perfect for Mars teleoperation
Summary Table (Clean & Direct)
Model Fits 8x8? Notes
Cat 301.9 Electric YES Only electric Cat that fits stock
Cat 906 Electric NO Too tall by rv4 in
Cat 320 Electric NO Too wide & tall
Cat 950 GC Electric NO Far too large
If you want, I can also:
Build a Mars-optimized Caterpillar-style excavator concept
Show how to modify the 906 Electric to fit inside an
Compare Caterpillar vs. Bobcat vs. Volvo electric machines for container fit
Design a multi-robot Mars construction fleet using only container-shippable equipment
Just tell me which direction you want to take this.
Bobcat electric machines vs 8x8 (width/height only)
Model Type Width (in) Height (in) Fits 8x8?
T7X Track loader N68 N80 YES
S7X Skid steer -80 YES
Micro excavator 28—44 m87 YES
Mini excavator æ39 YES
All four Bobcat electrics are under 8 ft wide and under 8 ft tall, so they pass your 8x8 face constraint.
Volvo electric machines vs 8x8 (width/height only)
Model Type Width (in) Height (in) Fits 8x8?
ECR18 Mini excavator YES
EC18 Mini excavator N90 YES
L20 Electric Compact wheel loader N63 NO (too tall)
L25 Electric Compact wheel loader æ63 N98 NO (too tall)
EC230 Medium excavator > 100 > 110 NO
#18 Re: Exploration to Settlement Creation » WIKI Constructing things on Mars equipment needs » 2026-03-09 14:02:40
Battery‑Electric Prototypes (Bauma 2022)
Cat 301.9 Electric
Type: Mini excavator
Status: Prototype, fully battery‑powered
Cat 320 Electric
Type: Medium excavator
Status: Prototype, closest to Mars‑scale digger
Cat 950 GC Electric Wheel Loader
Type: Wheel loader
Status: Prototype, high‑power earth‑moving
Cat 906 Electric
Type: Compact wheel loader
Status: Prototype, light construction
Are any Caterpillar machines “Mars‑ready”?
Extreme‑cold battery chemistry needed
Full dust‑proofing for Martian regolith
Radiation‑hardened electronics
Lightweight redesign for launch mass limits
Solar/nuclear charging infrastructure
8×8 CONEX Internal Dimensions
Width: ~92 in
Height: ~94 in
Length: ~19 ft 4 in
Caterpillar Electric Machines vs 8×8 Fit
Cat 301.9 Electric
Width: ~39 in
Height: ~90 in
Fits 8×8: YES
Cat 906 Electric
Width: ~70 in
Height: ~98 in
Fits 8×8: NO (too tall)
Cat 320 Electric
Width: ~102 in
Height: ~118 in
Fits 8×8: NO
Cat 950 GC Electric Wheel Loader
Width: ~112 in
Height: ~138 in
Fits 8×8: NO
Cat 301.9 Electric — The Only One That Fits
Width: 39 in
Height: ~90 in
Length: ~12 ft
Capabilities:
Light excavation
Trenching
Regolith handling
Teleoperation (Caterpillar Command)
Limitations:
Not for heavy earth‑moving
Not for bulldozing
Not for large‑scale site prep
Cat 906 Electric — Too Tall
Width fits
Height fails by ~4 in
Could fit with cab removal or redesign
Cat 320 Electric — Too Wide & Too Tall
Width: 102 in (fails)
Height: 118 in (fails)
Cat 950 GC Electric — Far Too Large
Width: 112 in
Height: 138 in
Implications for Mars Construction
Only the 301.9 fits stock
All larger Caterpillar electrics exceed 8×8 constraints
Your Options
1. Multiple Cat 301.9 units
Distributed digging
Easy to ship
Easy teleoperation
Low mass
2. Custom Caterpillar‑style chassis
Cab removed
Fold‑down ROPS
Narrow‑track variants
Modular boom assemblies
3. Flat‑pack approach
Ship components inside CONEX
Assemble on Mars with robotics
4. Use Caterpillar Command autonomous tech
Proven in remote, dusty, hazardous sites
Ideal for Mars teleoperation
Summary Table (Clean)
Cat 301.9 Electric
Fits: YES
Notes: Only electric Cat that fits stock
Cat 906 Electric
Fits: NO
Notes: Too tall by ~4 in
Cat 320 Electric
Fits: NO
Notes: Too wide & tall
Cat 950 GC Electric
Fits: NO
Notes: Far too large
Bobcat Electric Machines vs 8×8
T7X (Track loader)
Width: ~68 in
Height: ~80 in
Fits: YES
S7X (Skid steer)
Width: ~68 in
Height: ~80 in
Fits: YES
E10e (Micro excavator)
Width: 28–44 in
Height: ~87 in
Fits: YES
E19e (Mini excavator)
Width: ~39 in
Height: ~90 in
Fits: YES
Volvo Electric Machines vs 8×8
ECR18 (Mini excavator)
Width: ~39 in
Height: ~90 in
Fits: YES
EC18 (Mini excavator)
Width: ~39 in
Height: ~90 in
Fits: YES
L20 Electric (Compact wheel loader)
Width: ~63 in
Height: ~98 in
Fits: NO (too tall)
L25 Electric (Compact wheel loader)
Width: ~63 in
Height: ~98 in
Fits: NO (too tall)
EC230 (Medium excavator)
Width: >100 in
Height: >110 in
Fits: NO
Battery-Electric Prototypes (Bauma 2022)
Source: Caterpillar press release
Model Type Status Notes
Cat 301.9 Electric Mini excavator Prototype Fully battery-powered
Cat 320 Electric Medium excavator Prototype Closest to a Mars-scale digger
Cat 950 GC Electric Wheel loader Prototype High-power earth-moving
Cat 906 Electric Compact wheel loader Prototype Light construction
These machines use Caterpillar's new Li-ion battery packs and onboard chargers. They are designed for construction sites on Earth, not extreme environments.
Are any Caterpillar machines "Mars-ready"?
Not yet. Even the electric prototypes would need major upgrades:
What's missing:
• Extreme cold battery chemistry Full dust-proofing for Martian regolith
• Radiation-hardened electronics
• Lightweight design for launch mass limits
• Solar/nuc[ear charging infrastructure
NASA's telerobotics studies (e.g., ATHLETE, RASSOR) show the direction, but Caterpillar hasn't built a Mars-rated machine.
Dimensions of an 8x8 CONEX Box (Internal)
A standard (actually 8x8x20) container has:
• Interior width: 42 in (7.7 ft) Interior height: æ94 in (7.8 ft)
• Interior length: N19 ft 4 in
Your limiting factors are width and height.
Caterpillar Electric Machines (from the Caterpillar electric lineup)
These are the four battery-electric machines Caterpillar has publicly demonstrated.
Model Type Width Height Fits in 8x8?
Cat 301.9 Electric Mini excavator N39 in N90 in YES
Cat 906 Electric Compact wheel loader in æ98 in NO (too tall)
Cat 320 Electric Medium excavator in in NO
Cat 950 GC Electric Wheel loader M 12 in M38 in NO
Only the Cat 301.9 Electric fits inside an 8x8 container without modification.
Cat 301.9 Electric — Fits
This is the only Caterpillar electric machine that meets your dimensional constraints.
Why it fits:
Width: 39 in (3.25 ft)
Height: —90 in (7.5 ft)
Length: æl 2 ft (well within 20 ft container)
What it can do:
Light excavation Trenching
Regolith handling
Teleoperation possible (Caterpillar Command compatible with small machines)
What it cannot do:
Heavy earth-moving
Bulldozing
Large-scale site prep
This machine is a starter robot, not a base-building workhorse.
2. Cat 906 Electric — Too Tall
Width: æ70 in (fits)
Height: —98 in (8.16 ft) fails height limit bY N4 inches
Could it be modified to fit? Possibly — if the cab is removed or redesigned. But stock? No.
3. Cat 320 Electric —Too Wide & Too Tall
Width: 102 in (8.5 ft) + fails
Height: 118 in (9.8 ft) * fails
This is a serious excavator, but it's not container-friendly.
4. Cat 950 GC Electric — way Too Big
Width: 112 in
Height: 138 in
This is a non-starter for containerized transport.
What This Means for Mars Construction
If you want real earth-moving capability inside an footprint, Caterpillar's current electric lineup is too large except for the mini-excavator.
Your options:
1 . Use multiple Cat 301.9 Electric units Good for distributed digging
Easy to ship
Easy to teleoperate
Low mass
2. Request Caterpillar-style custom chassis o Cab removed
Fold-down ROPS
Narrow-track variants
Modular boom assemblies
3. Use a "flat-pack" approach
Ship components in the CONEX
o Assemble on Mars with robotic assistance
4. Use Caterpillar's autonomous mining tech (Command)
c Already proven in remote, dusty, dangerous environments c Perfect for Mars teleoperation
Summary Table (Clean & Direct)
Model Fits 8x8? Notes
Cat 301.9 Electric YES Only electric Cat that fits stock
Cat 906 Electric NO Too tall by rv4 in
Cat 320 Electric NO Too wide & tall
Cat 950 GC Electric NO Far too large
If you want, I can also:
Build a Mars-optimized Caterpillar-style excavator concept
Show how to modify the 906 Electric to fit inside an
Compare Caterpillar vs. Bobcat vs. Volvo electric machines for container fit
Design a multi-robot Mars construction fleet using only container-shippable equipment
Just tell me which direction you want to take this.
Bobcat electric machines vs 8x8 (width/height only)
Model Type Width (in) Height (in) Fits 8x8?
T7X Track loader N68 N80 YES
S7X Skid steer -80 YES
Micro excavator 28—44 m87 YES
Mini excavator æ39 YES
All four Bobcat electrics are under 8 ft wide and under 8 ft tall, so they pass your 8x8 face constraint.
Volvo electric machines vs 8x8 (width/height only)
Model Type Width (in) Height (in) Fits 8x8?
ECR18 Mini excavator YES
EC18 Mini excavator N90 YES
L20 Electric Compact wheel loader N63 NO (too tall)
L25 Electric Compact wheel loader æ63 N98 NO (too tall)
EC230 Medium excavator > 100 > 110 NO
#19 Re: Human missions » Mars Direct 3 is a Mars mission architecture developed by Miguel Gurre » 2026-03-08 18:44:01
Mentioned in our google meet.
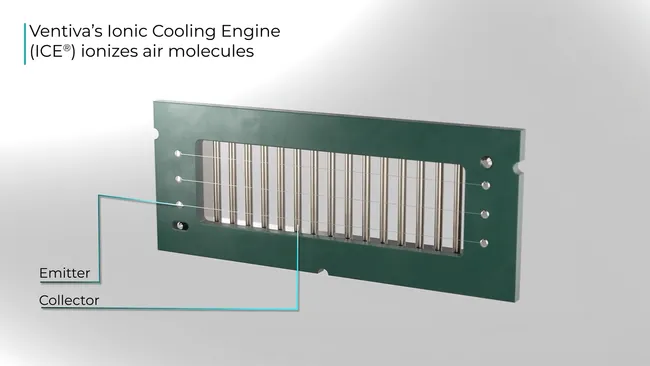
Ionic cooling, such as Ventiva's Ionic Cooling Engine (ICE) or Ionic Wind technology, is a fan-less, solid-state thermal management solution that uses electrohydrodynamic (EHD) flow to move air without moving parts. It operates by creating an electric field between electrodes to ionize air, creating a silent, vibration-free, and energy-efficient airflow ideal for compact, high-performance electronic
Key Aspects of Ionic Cooling Technology:
Mechanism: A high-voltage, low-current wire (emitter) ionizes air, which then rushes toward a grounded electrode (collector), creating a "wind".
Advantages: Silent operation (no fans), zero vibration, and high reliability due to no moving parts.
Applications: Specifically designed for space-constrained environments like laptops, tablets, edge servers, AI boxes, and medical devices.
Performance: It allows for higher sustained performance by providing efficient cooling, often outperforming traditional fans in compact spaces.
Innovation: Beyond air cooling, "ionocaloric" cooling is a different method that uses ions to drive solid-to-liquid phase changes for refrigeration.
Ionocaloric cooling is an emerging, efficient technology that uses ion flow from salt to drive phase changes (solid-to-liquid) for temperature regulation, offering potential for high-efficiency refrigeration. It can achieve a
temperature change with less than one volt. While distinct from traditional cryo-fuel storage, ionic liquids are used in advanced compression for hydrogen, improving efficiency and reducing contamination.
Linde
Linde
+3
Ionic Cooling Technology Overview
Mechanism: Uses salts to trigger phase changes in a material, absorbing heat when melting and releasing it when solidifying.
Efficiency: Potential to exceed current vapor-compression systems, which have high global warming potential.
Application: Researchers are testing this method for its high temperature-change capability with low voltage input.
Berkeley Lab News Center (.gov)
Berkeley Lab News Center (.gov)
+3
Ionic Liquids in Fuel Management
Ionic Compressors: Used to compress hydrogen gas (e.g., up to 100 MPa) without conventional lubricants, ensuring high purity for applications like fuel cells.
Benefits: These systems reduce wear and tear and have fewer moving parts than piston compressors.
Linde
Linde
Cryogenic Fuel Management (Context)
Challenges: Cryogenic fuels (like liquid hydrogen,
) experience significant boil-off in storage, which is a major issue for long-duration space missions (e.g., Mars).
Solutions: NASA is developing, newatlas.com active cooling and insulation systems, such as advanced cryocoolers, to achieve zero boil-off.
Fusion Cooling: In fusion devices, forced flow cooling ScienceDirect.com is used to manage the temperature of superconducting magnets using helium
#20 Re: Meta New Mars » Daily Recap - Recapitulation of Posts in NewMars by Day » 2026-03-08 17:38:11
Trying to do without prefilling of numbers being generated making use of excel and auto fill to do my best
starting post is carried from the previous days 3-07-2026 last number for the day 238433 - last post 238442
3-8-26 postings
Martian Calender - I have created a martian calender...
Google Meet Collaboration - Meetings Plus Followup Discussion
Google Meet Collaboration - Meetings Plus Followup Discussion
Google Meet Collaboration - Meetings Plus Followup Discussion
Why Artemis is “better” than Apollo.
Mars Direct 3 is a Mars mission architecture developed by Miguel Gurre
Daily Recap - Recapitulation of Posts in NewMars by Day
Daily Recap - Recapitulation of Posts in NewMars by Day
Mars Direct 3 is a Mars mission architecture developed by Miguel Gurre
#21 Re: Meta New Mars » Daily Recap - Recapitulation of Posts in NewMars by Day » 2026-03-08 17:22:06
Trying to do without prefilling of numbers being generated making use of excel and auto fill to do my best
starting post is carried from the previous days 3-06-2026 last number for the day 238420 - last post 238432
3-7-26 postings
Martian Calender - I have created a martian calender...
Martian Calender - I have created a martian calender...
How's the Society doing right now?
Recruiting expertise for NewMars Forum topics:
WIKI Project construction design meaning for insitu materials
WIKI Project construction design meaning for insitu materials
WIKI Project construction design meaning for insitu materials
International Space Station (ISS / Alpha)
International Space Station (ISS / Alpha)
International Space Station (ISS / Alpha)
Mars Direct 3 is a Mars mission architecture developed by Miguel Gurre
#22 Re: Human missions » Mars Direct 3 is a Mars mission architecture developed by Miguel Gurre » 2026-03-08 17:18:15
Fixing the boiloff means adding mass and power requirements to perform the task.
Active cryogenic cooling systems use external power, mechanical components (like pumps or compressors), and cryogens (liquid nitrogen, helium, or neon) to maintain temperatures below (123 K). These systems enable precise, high-efficiency, and continuous cooling for aerospace, medical (MRI), and industrial applications.
Key Components and Types
Mechanical Cryocoolers: Use compression/expansion cycles to remove heat, often using helium gas. Common types include Stirling, Gifford-McMahon, and Pulse Tube coolers.
Cryogen-Based Systems: Utilize direct application of liquid nitrogen or helium for instant, high-rate cooling.
Cryogenic Heat Pipes: Employed to move heat away from components and keep liquids in their liquid state.Common Applications
Aerospace: Cooling satellite sensors (e.g., Webb telescope's MIRI), propellant storage, and space simulations.
Industrial/Manufacturing: High-speed machining, food freezing, and material testing.
Medical & Research: MRI scanners, superconducting magnets, and laboratories.Advantages
Performance: Capable of maintaining extremely low, stable temperatures.
Flexibility: Provides both cooling and heating capabilities in industrial processes.
Efficiency: Modern, closed-loop systems (e.g., Pulse Tube) are compact, low-mass, and highly reliable
An important step even for starship current systems.
#23 Re: Human missions » Why Artemis is “better” than Apollo. » 2026-03-08 16:04:55
Opinion: Isaacman makes his mark by revamping the Artemis return to the moon
It appears Halo or gateway is next since the larger sls is not happening
The strategy involves flying an Earth orbit mission in 2027, in which the Orion spacecraft would rendezvous and dock with one or both of the planned Human Landing Systems, the SpaceX Starship and the Blue Origin Blue Moon. The new mission would be designated Artemis III.
The first lunar landing attempt, now Artemis IV, would take place in early 2028. A possible second lunar landing is envisioned for later that year and would be designated as Artemis V.
Isaacman proposes to adhere to this new, ambitious launch schedule by launching the Space Launch System once every 10 months instead of once every two to three years. He means to accomplish this by “standardizing” the Space Launch System in several ways.
First, he aims to cancel the Exploration Upper Stage, the Mobile Launcher 2 and the 1B configuration, saving billions of dollars. He also plans to fly the Artemis II circumlunar mission and the Artemis III Earth orbit mission with the current upper stage, and to fly the Artemis IV and Artemis V lunar landing missions with a “standardized” new upper stage, possibly a Centaur V.
Left unstated was what would happen to the lunar orbital Gateway Space Station, where crews would transfer from the Orion space capsule to a Human Landing System before proceeding to the lunar surface.
Also missing from Isaacman’s announcement is what will happen to the Space Launch System after Artemis V. The huge, expensive rocket has been authorized through that mission. Will commercial, cheaper means of traveling from the Earth to the moon and back be available by then? The answer is unknown at the present time.
Isaacman received fire from one high-profile critic. Lori Garver, who was NASA deputy administrator during the Obama presidency when the Space Launch System was first authorized, did not mince words in a post on X: “The focus on Artemis spin over substance has been troubling since its inception,” she wrote. “However, expressing confidence that we can add a flight in between and make two lunar landings in 2028 is more magical thinking. We didn’t “wait” 3.5 yrs between launches because we wanted to, that is what it took.”
saacman replied with measured calmness and directness, saying that “accepting a 3.5-year launch cadence, the lowest by far of any NASA-designed program in history, because ‘that is what it took’ is exactly what needs to be fixed.”
“In fact, I am surprised you would describe launching Moon rockets inside a year as ‘magical thinking.’ I would say launching Apollo 8 just weeks after Apollo 7 was magical,” he added.
Isaacman, an engineer who founded two billion-dollar companies, one at the tender age of 16, and flew into space twice on his own dime, has certainly done impossible things before. He is confident that he can make the increased flight rate happen, though he acknowledged its difficulty.
Ars Technica’s Eric Berger offered a more positive reaction: “Isaacman has been quite good about saying uncomfortable truths about NASA and Artemis out loud. He has clearly diagnosed some of the major issues facing the space agency, not flinched from them, and is trying to address them.”
As it turns out, Sen. Ted Cruz’s (R-Texas) Senate Commerce Committee has passed a version of the latest NASA Authorization bill that fully endorses Isaacman’s plan to revamp the Artemis program. That all but guarantees that NASA is free to proceed without political interference.
Even Garver was impressed, so much so that she did a complete 180 on her assessment of Isaacman’s plan. She called the reauthorization “a significant and extremely positive development,” on X and said Isaacman’s “credibility, willingness to go public with existing program’s shortcomings and crafting a plan giving [the Space Launch System] a chance to improve, while allowing competition worked! Promising indeed!”
Isaacman has proven himself to be a political jedi master as well as an entrepreneur and engineer. But now comes the hard part.
The first part of success will consist of the upcoming Artemis missions occurring on or at least close to the times they are scheduled to occur. The second part will be at least a good start at constructing the lunar base. Both will mean that the return to the moon, long dreamed of, is a reality and not just an aspiration.
#24 Re: Science, Technology, and Astronomy » Google Meet Collaboration - Meetings Plus Followup Discussion » 2026-03-08 15:54:15
thanks for the reminder as the computer is not on a network to do automatic update.
#25 Re: Human missions » International Space Station (ISS / Alpha) » 2026-03-07 19:15:08
The original maker is no longer in business and all tooling is gone to make replacements.
So we are left to disposal at some point. Even the Halo stuff for the moon is basically junk as its not being done correctly by the clowns....